Modeling deformable objects -- especially continuum materials -- in a way that is physically plausible, generalizable, and data-efficient remains challenging across 3D vision, graphics, and robotic manipulation. Many existing methods oversimplify the rich dynamics of deformable objects or require large training sets, which often limits generalization. We introduce embodied MPM (EMPM), a deformable object modeling and simulation framework built on a differentiable Material Point Method (MPM) simulator that captures the dynamics of challenging materials. From multi-view RGB-D videos, our approach reconstructs geometry and appearance, then uses an MPM physics engine to simulate object behavior by minimizing the mismatch between predicted and observed visual data. We further optimize MPM parameters online using sensory feedback, enabling adaptive, robust, and physics-aware object representations that open new possibilities for robotic manipulation of complex deformables. Experiments show that EMPM outperforms spring-mass baseline models.
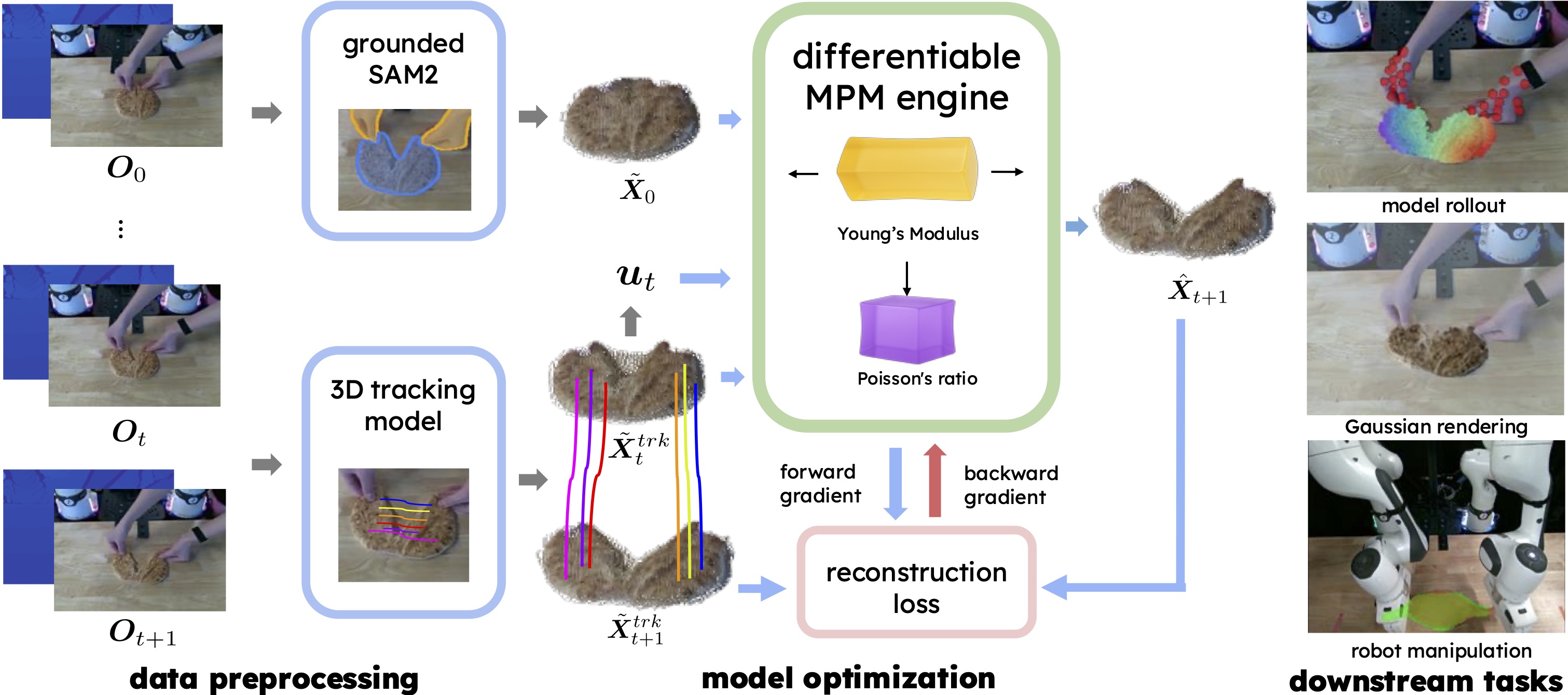
Our MPM simulation engine takes a reconstructed pointcloud and tracked 3D points as inputs. The model parameters are optimized using the discrepancy between the model's prediction and 3D shape reconstruction and tracking. The control inputs applied to the dynamics model of MPM is computed as the velocity extracted from the reconstructions. In the inference stage, we test the model's performance in terms of predicting 3D point positions and RGB image rendering of the 3D Gaussian splats.
We perform offline simulation and optimization of objects using collected RGB-D videos. The physics parameters are optimized by matching the model predictions with the reconstructed 3D points and their tracking trajectories.
Collected Video
Offline Simulation Twin
Stretch dough
Collected Video
Offline Simulation Twin
Squeeze plasticine
Collected Video
Offline Simulation Twin
Tear bread
Collected Video
Offline Simulation Twin
Manipulate rope
Collected Video
Offline Simulation Twin
Lift cloth
We also perform online simulation and optimization using real-time streaming sensory data.
In the simulation clip, the red part is the segmented object, and the green part is the simulation overlay.
Streaming Video
Online Simulation Twin
Manipulate rope
Streaming Video
Online Simulation Twin
Manipulate bread dough
We showcase model rollouts in which optimal controller actions are explored in simulation while the robot tracks the simulated rollout to execute the task.
In the simulation clip, the red part is the segmented object, and the green part is the simulation overlay.
Simulation Rollout
Robot Execution
Manipulate rope
Simulation Rollout
Robot Execution
Manipulate bread dough
We compare our method with PhysTwin. MPM excels at simulating highly deformable actions such as bread tearing, which are difficult to model using the spring–mass model as in PhysTwin.
GT
Ours
PhysTwin
Tear bread
GT
Ours
PhysTwin
Squeeze plasticine
GT
Ours
PhysTwin
Manipulate rope
@article{chenhu2026empm,
title={EMPM: Embodied MPM for Modeling and Simulation of Deformable Objects},
author={Yunuo Chen* and Yafei Hu* and Lingfeng Sun and Tushar Kusnur and Laura Herlant and Chenfanfu Jiang},
journal={IEEE Robotics and Automation Letters (RA-L)},
year={2026},
}